|
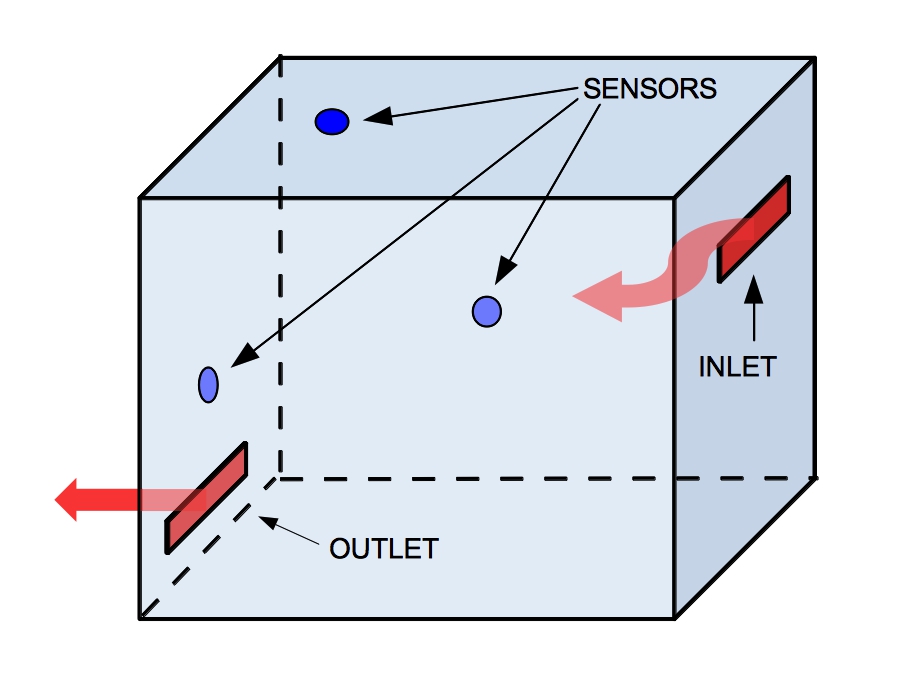
The optimal placement of sensors (such as thermostats) is usually a complex multiscale problem where multiple nonlinear processes are coupled. Here we assume $\Omega$ is a room or building where sensors are placed and a ventilation system is in place with an outlet and an inlet; see Fig. 1. The temperature of the room is determined by $u$ such $u:\Omega\to\mathbb{R}^n$ , and it is advected by a the velocity profile of the air $\vec{v}:\Omega\to\mathbb{R}^{n\times n}$. |
Fig.1-Room sample. |
|
The convection-diffusion process is perturbed by an stochastic (Wiener) process $\eta$. We measure $u$ with a sensor in location $x$ by a weighted average within an effective range and obtain an output $h_x$ which is also perturbed by an stochastic process $\nu$. The system satisfied by this variables is given by
they are
\begin{align*}
u'&=\alpha\Delta u+v\cdot\nabla u+ \eta;\\
h_x&=C(x)u+\nu;
\end{align*}
where the sensor action is described by
\begin{align*}
C(x)w=\int_{\Omega}K(y-x)w(y) dy,
\end{align*}
where $K$ is some function obtained from properties of the sensor. A good criteria for good a sensor is placed is obtained by trying to minimize the expected value of $|u-\tilde{u}_x|^2_{L^2(\Omega)}$ where $\tilde{u}_x$ is the output of the Kalman Filter.
|
with R. Arndt, and A. Ceretani.
Proceedings of VII MACI 2019, Río Cuarto, Argentina, Volume: 7, 2019.
with R. Arndt, and A. Ceretani.
arXiv preprint 1910.03994, 2019.
with A. N. Ceretani.
Zeitschrift für angewandte Mathematik und Physik (ZAMP) 70: 14, 2019.
with M. Hintermüller, M. Mohammadi, and M. Kanitsar.
SIAM Journal on Control and Optimization, 55(6), 3609-3639, 2017.
with J. A. Burns.
Numerical Functional Analysis and Optimization (Taylor & Francis), 36(2), pp. 181-224, 2015.
with J. A. Burns.
SIAM Journal on Control and Optimization, 53(5), pp. 2846-2877, 2015.