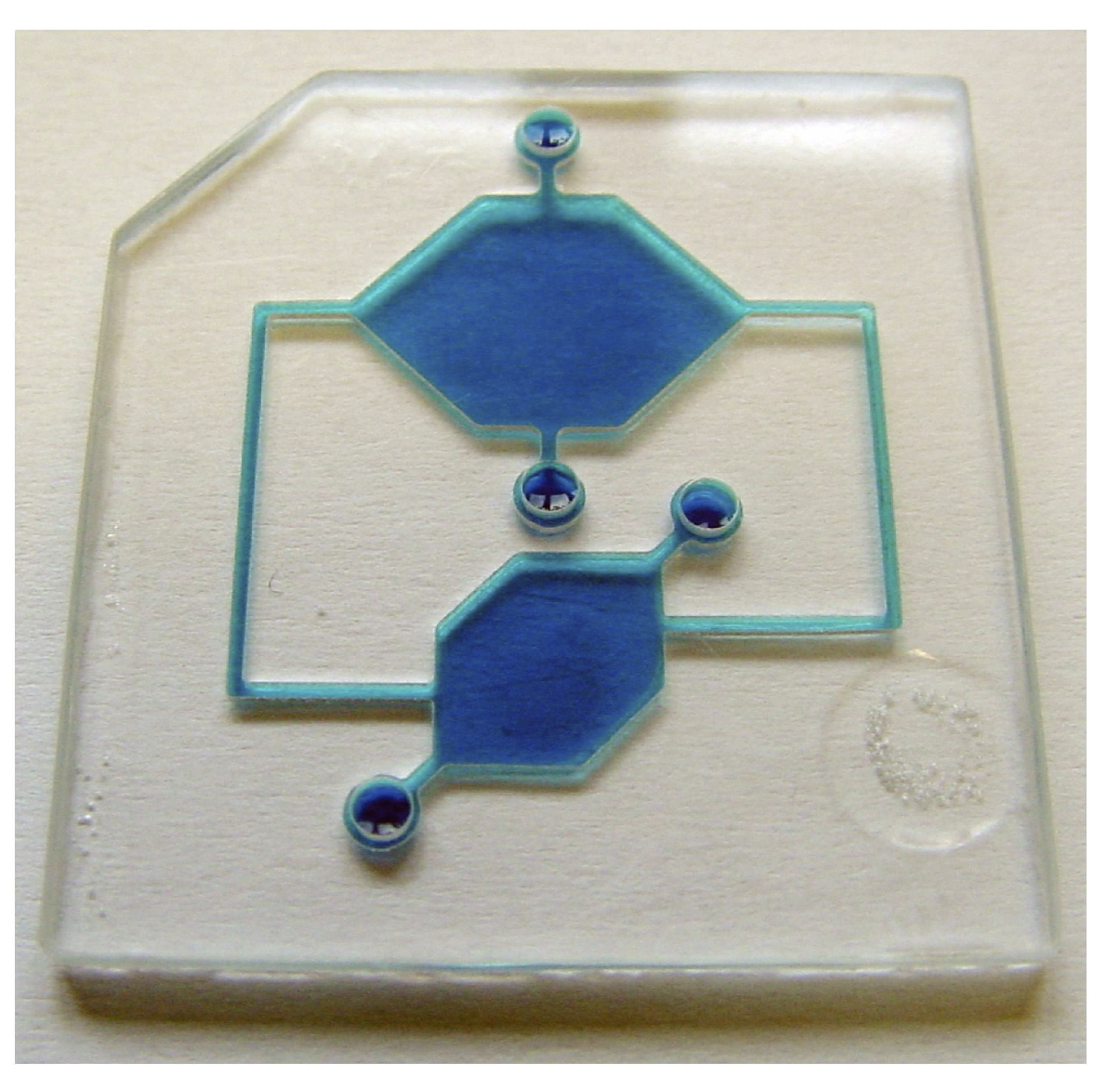
 Fig 1: Microfludic biochip with microchannels and two hexagonal reservoirs, typical characteristic length is O(mm). |
|
Fig 1: Microfludic biochip with microchannels and two hexagonal reservoirs, typical characteristic length is O(mm). |
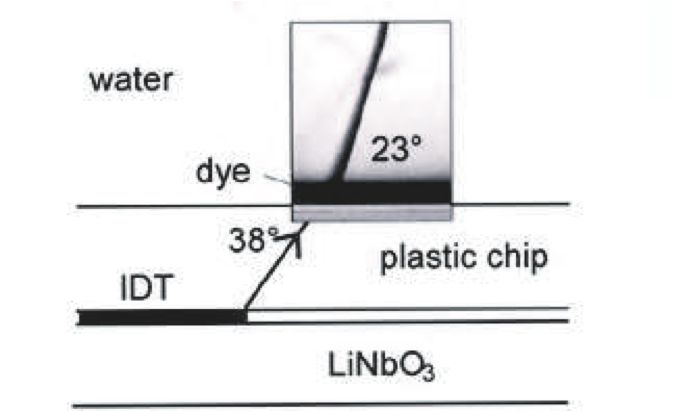 Fig 2: A sharp jet is created by an interdigital transducer (IDT), placed on a piezoelectric substrate (lithium niobate in our case) and steers out surface acoustic waves (SAWs), which in turn makes the fluid to move (experimental setup). |
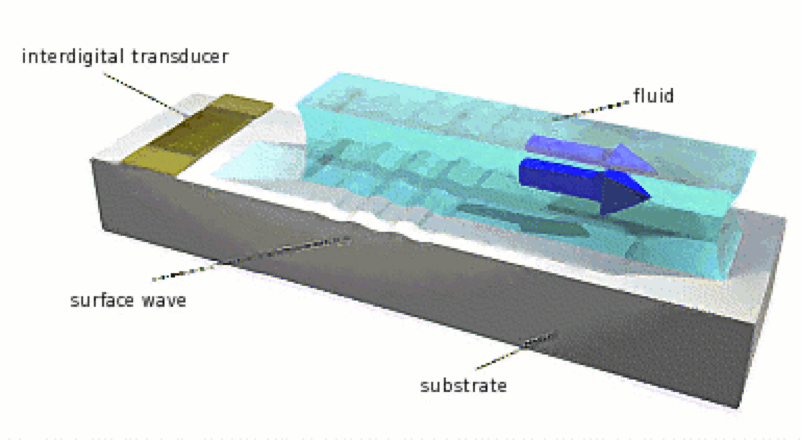 Fig 3: A cartoon with further elaboration of the phenomenon explained in left figure (courtesy: D. Köster [2006]). |
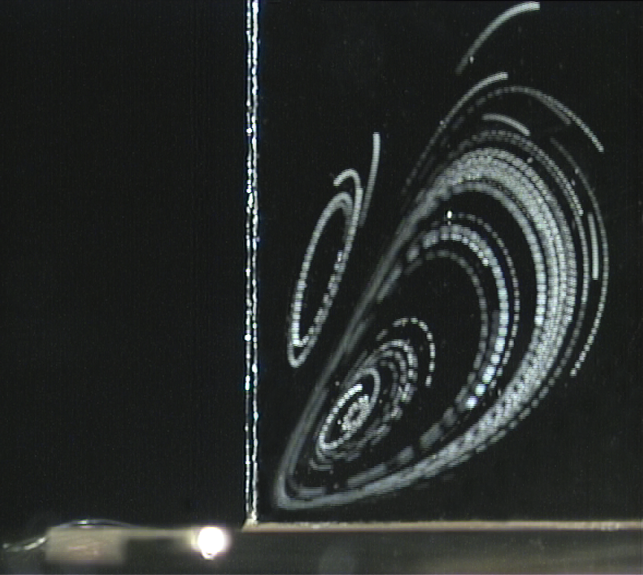 Fig 4: Experimentally obtained acoustic streaming pattern. |
|
Surface Acoustic Wave
Fig 5: A SAW entering entering in the domain using an IDT placed at the bottom left corner. |
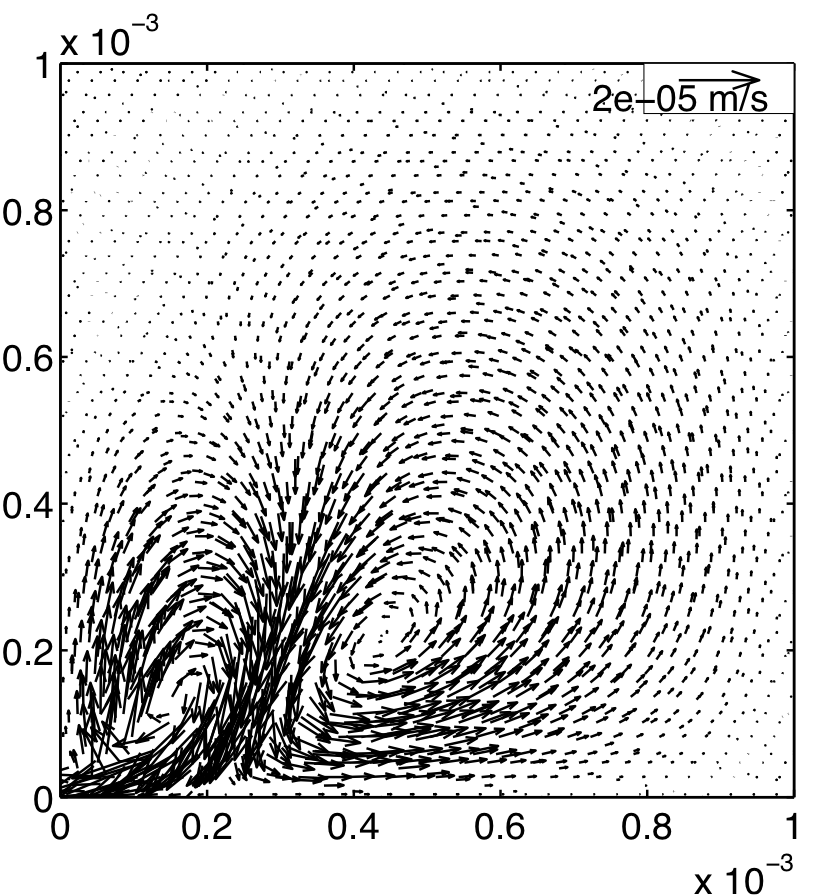 Fig 6: Stationary acoustic streaming pattern. |
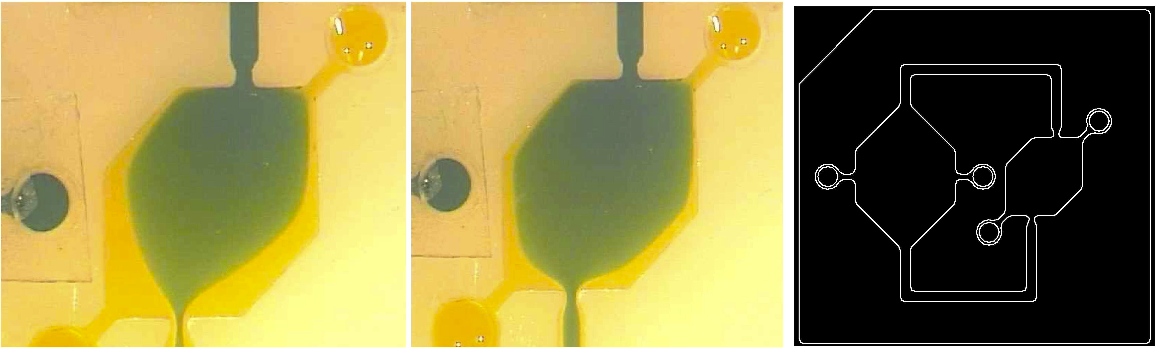 Fig 7: Experimental filling of hexagonal shaped reservoirs which are part of microfluidic biochip. |
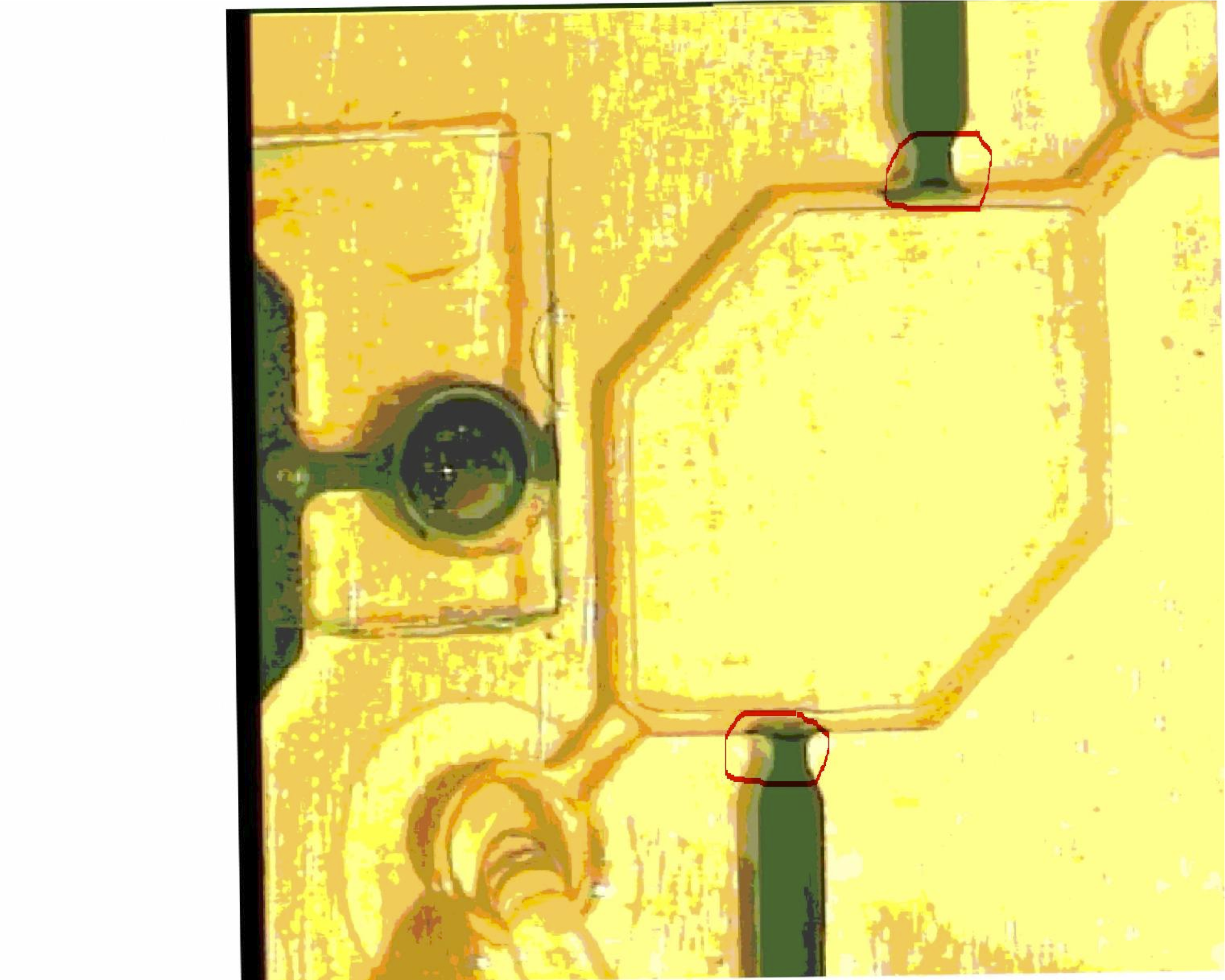 Fig 8: In order to ensure that the reservoirs are filled with precise amount of fluid we want to do shape optimization of the capillary barriers (marked in red) and since remaining part of the domain is large and fixed there we apply model reduction. As a result we have to solve a system of very small size as compared to a huge problem during optimization. |
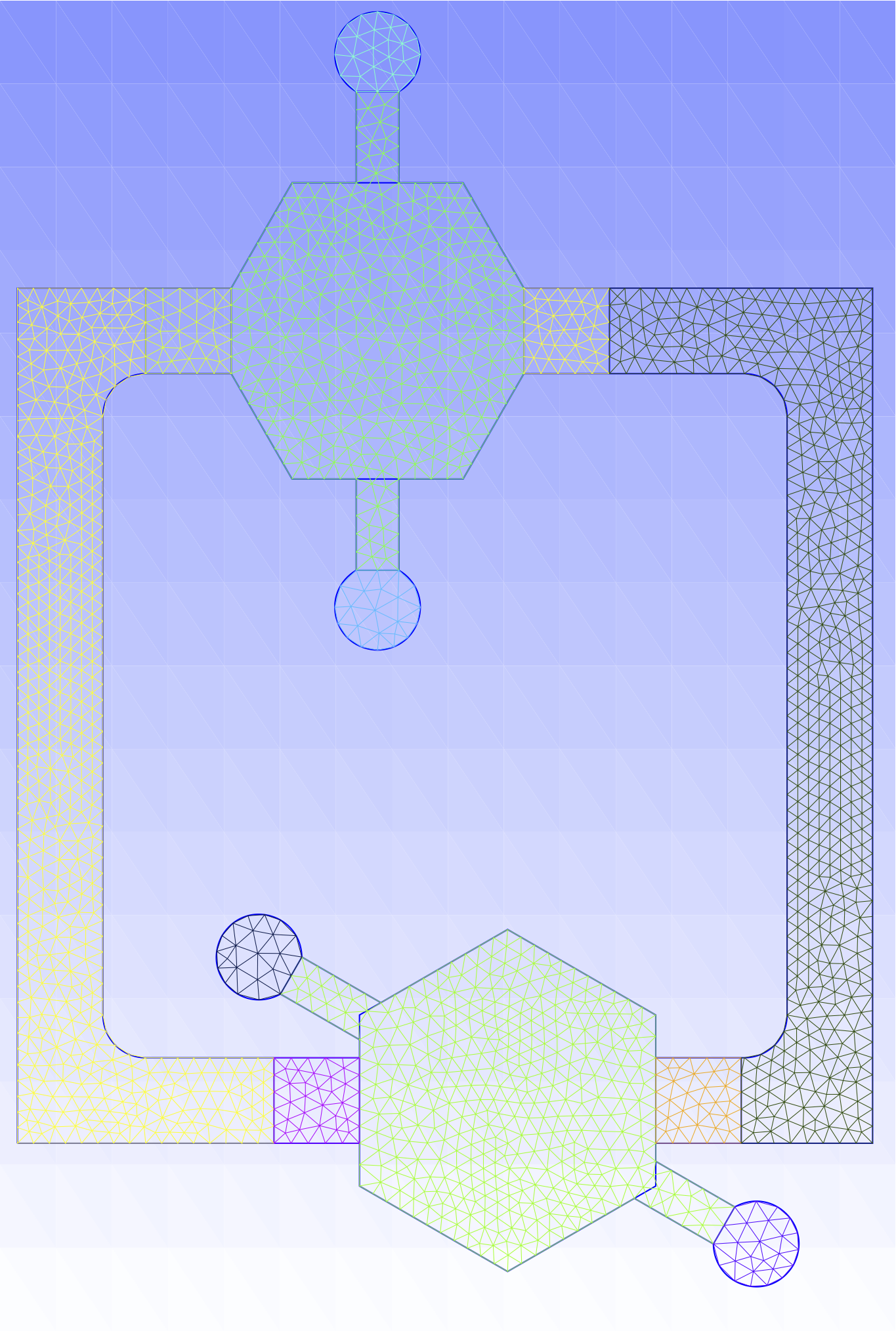 Fig 9: A finite element mesh generated for the microfluidic biochip using gmsh. |